

Komunikasi Serial USART
Pada bahasan Sebelumnya, kita telah belajar tentang Pendahuluan, sekarang sy akan sharing tentang komunikasi serial. Pada Mikrokontroler yang sy gunakan, terdapat fasilitas komunikasi serial dengan USART (Universal Syncronous Asyncronous Receiver / Transmitter) yaitu sebuah port serial baik itu db9 atau db 25 yang digunakan untuk bertukar informasi antara mikrokontroler dan Komputer. Misalnya kita akan mengirimkan pesan �Hallo� dari komputer untuk diterima di mikrokontroler
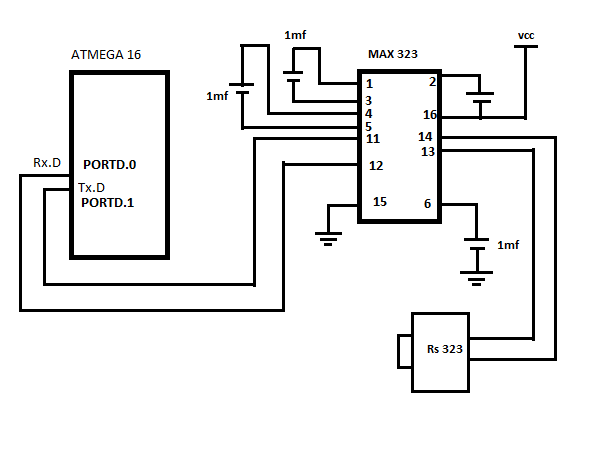
Untuk berkomunikasi, maka diperlukan sebuah IC Max 232 yang akan dihubungkan di mikrokontroler, berikut ini rangkaian nya :


while(1){
printf(�Hello�);
delay_ms(1000);
}
Untuk ngecek di komputer, apakah sudah diterima atau belum, maka buka hyperterminal, pada accesories, kemudian setting baud rate nya 9600
Maka di hyper terminal akan muncul tulisan : Hello
2. Untuk membuat program untuk menginputkan dari Komputer menuju mikro, Masukan Program Berikut :
void main(void){
unsigned char data;
while(1){
data=getchar();
if(data==�a'){
PORTC=0b00000000;
delay_ms(1000);
}
}
Untuk berkomunikasi, maka diperlukan sebuah IC Max 232 yang akan dihubungkan di mikrokontroler, berikut ini rangkaian nya :
Buka Code Vision AVR, kemudian setting sbb :
Untuk membuat program untuk menginputkan dari mikro menuju ke komputer, Masukan Program Berikut :
while(1){
printf(�Hello�);
delay_ms(1000);
}
Untuk ngecek di komputer, apakah sudah diterima atau belum, maka buka hyperterminal, pada accesories, kemudian setting baud rate nya 9600
Maka di hyper terminal akan muncul tulisan : Hello
2. Untuk membuat program untuk menginputkan dari Komputer menuju mikro, Masukan Program Berikut :
void main(void){
unsigned char data;
while(1){
data=getchar();
if(data==�a'){
PORTC=0b00000000;
delay_ms(1000);
}
}








1. Jangan Menggunakan Link Hidup Kecuali Penting
2..Komentar Yang Relevan Akan Saya Balas
3.Untuk Menggunakan Emoticon Klik Emoticon Terlebih Dahulu Untuk Mendapatkan Kode
Note:Komentar Anda Terlebih Dahulu Di Moderasi Untuk Tidak Terjadi Pelanggaran !